
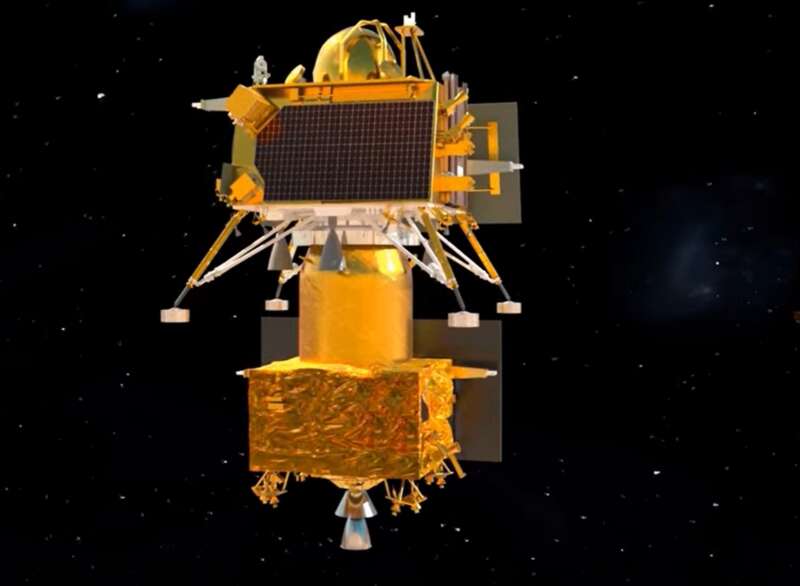
印度空间研究组织(ISRO)公布的月船三号探测器模拟图。
印度发射新月球探测器——月船三号,这是印度雄心勃勃月球探测计划的一部分。
7月14日,搭载月船三号探测器的LVM3运载火箭发射成功,探测器进入预定轨道,月船三号探测器预定于8月23日着陆月球南极,如果一切顺利的话,它将成为人类历史上第一个月球极区着陆器。
[xyz-ihs snippet=”In-article-ads”]印度开国总理尼赫鲁曾说印度要做“有声有色的大国”,这个大国梦想不仅是尼赫鲁的个人雄心,更是印度的国家梦想。印度航天作为国家追求“有声有色”大国梦想路上为数不多的亮点,印度正通过月球探测展示自己的大国雄心。
印度的月球探测计划
印度空间研究组织(ISRO)的月船三号探测器将再次挑战高难度的月球软着陆,试图实现印度成功落月“零的突破”。月船三号很大程度上是月船二号探测器的克隆,我们回顾印度更早的月船系列探测器,会发现虽然印度的月球探测成就和体系上远不能与中国、美国等国家相提并论,但其月球探测计划如果成功,仍将是世界各国中屈指可数的。
印度的月球探测计划于20年前正式启动,2003年,印度总理在8月15日的国庆日上宣布,印度将开展月球探测,而印度业内正式讨论月球探测计划,至少可以追溯到1999年的印度科学院会议。2003年4月印度上百名行星和空间科学领域的著名科学家讨论并通过了向月球发射探测器的建议,促成了印度政府在同年11月正式批准这项任务,这就是2008年发射的月船一号探测器。
印度虽然人口众多,但工业和科学基础薄弱,月球探测只能量体裁衣,选择符合印度国情的设计方案。月船一号项目的目标,是实现印度月球探测零的突破,使用印度现有的火箭将印度研制的探测器送入月球轨道,并开展试验性的科学研究,包括绘制月面立体地图,以及研究月面物质组成等。月船一号探测器发射重量1380千克,携带了11个科学载荷,其中5个是印度研制的,另外6个分别由欧美国家提供,它还携带了一个月球撞击器。
[xyz-ihs snippet=”GoogleADresponsive”]2008年10月22日,印度使用PSLV运载火箭成功发射了月船一号探测器,经过探测器的多次变轨后飞向月球,并完成近月捕获最终进入距离月面100公里高度的圆轨道。月船一号探测器的著名成果包括使用国产的地形测绘相机(TMC)绘制了7米分辨率的全月图,以及搭载的美国月球矿物绘图仪(M3)发现了月球极区存在水,激发了人类对月球探测的热情。
月船一号作为印度月球探测的开路先锋并不完美:虽然探测器设计寿命2年,但印度对近月轨道的热环境考虑不足,100公里高度的月船一号探测器被月面反射的高温致失效,于2009年8月28日彻底失去联系。月船一号仅仅工作了312天,但整个项目只花了约8300万美元,总体上还是成功的。印度科学界在月船一号发射前,就雄心勃勃地讨论了着陆探测等后续计划,2008年9月18日印度政府决定支持月球软着陆探测项目。

准备装进火箭整流罩的月船三号探测器。
[xyz-ihs snippet=”googleAD300x100″] 月船二号探测器设计上比一号复杂得多,月船一号只是一个一吨级通信卫星平台,而月船二号发射质量达到了3850千克,包括轨道器、着陆器和月球车三个部分,其中着陆器被命名为Vikram,以纪念印度航天之父Vikram,而月球车被命名为Pragyan,整个项目花费了96亿卢比(当时币值约合1.3亿美元)。印度于2019年7月22日使用LVM3火箭发射了月船二号探测器,这也是LVM3的首次正式发射任务,当年8月20日探测器进入月球轨道,9月7日开始实施月球软着陆。月船二号的变轨和软着陆机动开始相当顺利,但高度降低到2.1公里高度时飞行轨迹开始偏移,遥测信号显示Vikram着陆器最后的垂直下落速度超过58米/秒,这肯定是硬着陆了。
事后,美国LRO月球轨道器的高分辨率卫片显示,Vikram着陆器彻底摔碎了,印度的首次月球着陆尝试以彻底失败告终,月球车更是和着陆器同归于尽,月面巡视还没开始就结束了。尽管如此,月船二号任务的轨道器还是取得了一定的成绩,月船二号轨道器携带了印度研制的多种仪器载荷,尤其是高分辨率相机(OHRC)具备0.32米的超高分辨率,超过了美国的LRO探测器的0.5米,考虑到月船二号轨道器运行高度是100公里,而LRO是50公里,OHRC相机的角分辨率是LROC相机的3倍。月船二号轨道器拍摄了大量月面高分辨率卫片,包括月船二号着陆器残骸以及美国阿波罗登月遗址。
承上启下的月船三号
2019年月船二号的软着陆失败了,但这次登月失败并没有浇灭印度的月球雄心。2019年11月,印度空间研究组织宣布将实施新的月球软着陆任务,这项任务被命名为月船三号。由于印度政府支持相当有限,印度月船探测器并没有像我国嫦娥系列探测器那样研制备份星,但月船三号探测器在总体设计上是月船二号的复制,相当于重新造了一个月船二号,它的主要目标也是继续挑战月球软着陆技术,突破和掌握月面软着陆和巡视能力。
月船三号任务是印度空间研究组织和印度科学家们的“心头肉”,但印度政府对这个项目积极性并不高。2019年印度空间研究组织为月船三号任务申请了7.5亿卢比预算,根据该组织前任主席K·斯万的说法,月船三号任务的总预算大约为61.5亿卢比(约合7488万美元),其中探测器研制预算为25亿卢比(约3000万美元),而发射火箭LVM3都需要36.5亿卢比(4450万美元)。虽然整个项目预算资金低得可怜,不得不调整项目,月船三号探测器将只包括着陆器和巡视器,而去掉了独立的轨道器。由于着陆器不具备独立实施近月制动进入月球轨道的能力,月船三号还需要一个可分离的推进舱执行近月制动任务,从目前公开的月船三号照片看,所谓推进舱就是没有安装原有探测载荷的轨道器,但这个推进舱倒不全是空壳,它还装有名为地球光谱偏振仪(SHAPE)的载荷,从月球轨道研究地球的光谱和测量偏振,它还携带S波段转发器,为着陆器提供信号中转功能。
[xyz-ihs snippet=”In-article-ads”]月船三号发射质量约3.9吨,其中推进舱质量2145千克,着陆器质量1749千克,着陆器中包括一辆26千克的月球车。为了适应月球极区阳光照射角低的环境,月船三号着陆器四个侧面贴装了太阳能电池,提供738瓦的功率,巡视器更是特意安装了一个竖起的太阳能电池板,发电功率为50瓦。月船三号着陆器设计上相当保守,并没有考虑度过月夜,其设计寿命只有14天(一个月昼),小小的月球车就更不考虑过夜了。印度空间研究组织为月船三号任务设定的三大目标:突破掌握月球软着陆技术,验证巡视器技术和开展原位科学探测,第一项由着陆器实现,后两项依靠巡视器完成。

月船三号着陆器中包括一辆26千克的月球车。
虽然月船三号着陆器和月球车设计上和月船二号探测器大致相同,但印度仍对它们做了一些改进,以提高月船三号任务的成功率。月船三号着陆器移除了二号着陆器中心的发动机,把800牛变推力着陆主发动机的数量从5台减少到4台,印度800牛发动机采用双组元推进剂,但据称变推力节流下限只到80%,这明显增加了软着陆的控制难度,要实现垂直速度小于2米/秒的软着陆,对它的着陆控制算法是一个不大不小的考验。印度曾试图为月船三号着陆器进口高精度的激光多普勒测速仪(LDV),但一直没买到,只好自力更生,研制了印度自己的激光测速仪。印度还为着陆器安装了额外的摄像头,提高着陆器的态势感知能力,为软着陆过程提供更全面可靠的依据。月船三号预定落点为南纬69.367621度, 东经32.348126度,和月船二号的落点并不远。
月船三号着陆器装有测量等离子体密度和变化的朗缪尔探针(LP),以及测量热导率和温度的钱德拉表面热物理实验仪(ChaSTE),测量着陆区月震活动的月震仪(ILSA)。月船三号的月球虽然尺寸很小,但麻雀虽小五脏俱全,它装有阿尔法粒子X射线光谱仪(APXS)和激光诱导击穿光谱仪(LIBS),尤其是LIBS的使用仅晚于美国和中国的大型火星车,也是世界上第一个装有LIBS的月球车。APXS和LIBS将用于开展月球原位探测,尤其是LIBS能通过非接触式探测快速获得物质元素成分信息,对月球表面的月壤月岩的成本进行研究。
总的来说,月船三号最重要的使命就是突破软着陆技术,为印度后续探月任务以及印度参与的国际合作计划奠定基础。印度和日本2017年签署了预研协议,2021年正式宣布联合实施名为月球极区探测计划(LUPEX)的探月项目,其中印度提供月球着陆器,而日本提供H3火箭和月球车。月船二号本来要为它验证软着陆器技术,但着陆失败导致只能再进行一次着陆尝试即月船三号项目。如果月船三号软着陆成功的话,印日将研制和发射LUPEX探测器,对月球南极进行原位探测。LUPEX的主要目标是勘测分析月球极区的水资源,着陆器将携带至少350千克的载荷,月球车搭载印度和日本的多种载荷,包括从1.5米深度钻取地下样本的钻机。
[xyz-ihs snippet=”GoogleADresponsive”]
此次发射月船三号探测器的LVM3火箭。
印度的探月雄心
预算和支持力度不足是制约印度月球和深空探测最主要原因,但印度航天并不缺乏对未来的设想和规划。
印度在月球探测上提出了环绕探测,着陆探测,月面取样和取样返回四个阶段的发展战略。月船一号任务实现了环绕探测,还携带撞击器进行了撞击探测;月船二号目标是突破掌握软着陆技术,以及开展巡视探测,月船二号着陆失败,现在月船三号将继续落月尝试;印度和日本还在联合推进月球极区探测任务/LUPEX,它也被印度人称为月船四号探测器,虽然项目还没有正式立项,但双方都在开展研制工作,预计2026-2028年发射。
月船四号着陆月球南极点附近后,将使用印度研制的钻机钻取月球地下样本,加热分析是否存在挥发物尤其是水。月船四号着陆器还将验证月夜生存技术,设计寿命达到6个月,也为开展更复杂的月球探测任务铺平道路。印度还准备启动月船五号探测项目,探测器可能在2030年前后发射,它的定位和功能类似月船四号,同样选择月球极区着陆,但将是印度主导完成的任务,据称它配有大型巡视器,也将钻取样品进行原位研究;印度也在策划月球取样返回探测器,未来可能编号为月船六号任务,但作为远景规划实施时间将在2030年之后。总而言之,印度的月球探测同样要走“绕落回”的大方向,但印度根据自身能力和国际合作环境,多出一个极区取样探测的阶段。
印度在探月方面也在积极开展国际合作。2008年发射的月船一号轨道器上,就搭载了NASA等外国机构提供的多种科研载荷,今年6月23日印美签署阿尔忒弥斯协定,印度成为阿尔忒弥斯协定的第27个签署国。美国目前正在实施阿尔忒弥斯登月计划,而阿尔忒弥斯协定的目标不仅是增进阿尔忒弥斯计划的国际合作,让大家共同为美国主导的载人重返月球添砖加瓦,也有抱团建立新的国际化框架的远景。
美国发起国际空间站项目,向参与国家尤其是盟友提供便利转让技术,让欧洲和日本搭便车大大增强了载人航天能力,阿尔忒弥斯协定下的各个国家也有望得到美国的支持和技术转移,这对印度这样具备一定的航天实力和巨大的发展潜力但深空探测水平还比较落后的国家来说绝对是及时雨,印度未来可能获得深度交流的机会和技术输出,研制出更先进的月船系列探测器,未来甚至不排除以下一代火箭和飞船参与载人登月计划,为印度发展独立的载人登月能力打基础。
来源: 澎湃新闻
[xyz-ihs snippet=”MoreTechNews”] [xyz-ihs snippet=”multiple-ads”]891 views


